

摘要:本文探讨了马斯克提出的纯视觉方案与激光雷达方案,分析了两者在算力与门槛方面的挑战以及未来的融合趋势。纯视觉方案依赖强大的计算能力和算法优化以实现高精度识别,而激光雷达方案则提供更准确的定位和深度感知。随着技术的发展,两者在算力提升和成本降低的基础上有望实现融合,进一步提升自动驾驶的感知能力和安全性。
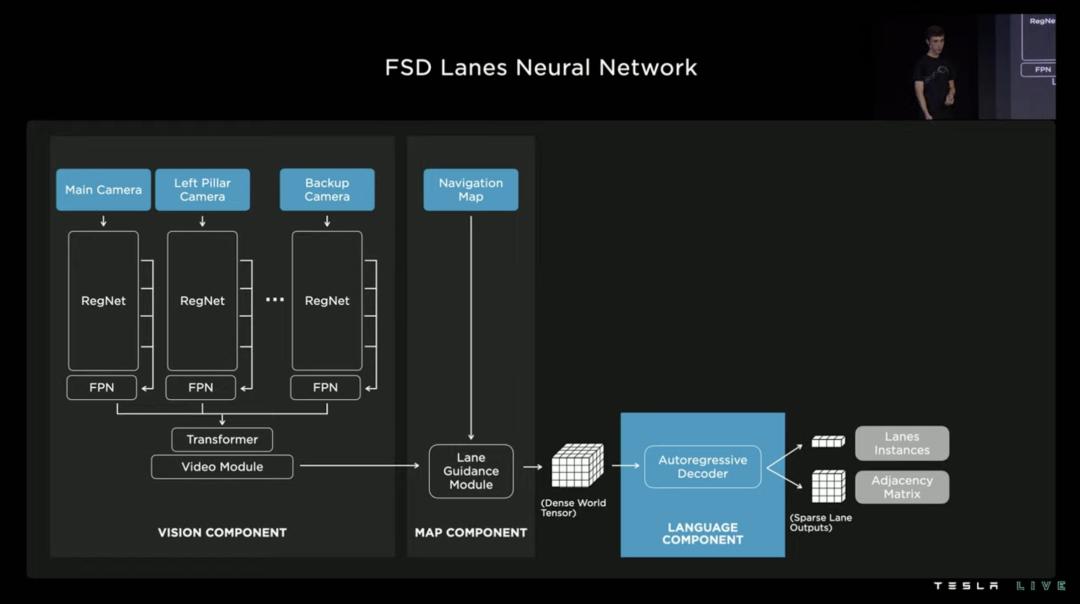
马斯克的纯视觉方案主要依赖于深度学习算法和大量的数据训练,通过摄像头捕获的图像信息来进行环境感知、车辆定位、路径规划等自动驾驶任务,这一方案的优点在于随着技术的发展和数据的积累,其性能可以不断提升,纯视觉方案对算力要求极高,需要强大的芯片和算法支持,因此门槛相对较高,需要深厚的计算机视觉和深度学习技术积累。
相比之下,激光雷达方案则通过激光雷达获取车辆周围的环境信息,结合高精度地图和定位技术实现自动驾驶,这一方案在恶劣天气和光照条件下的性能更加稳定,虽然目前激光雷达的成本相对较高,但随着技术的进步和生产规模的扩大,其成本有望逐渐降低,激光雷达方案的门槛相对较低,使得更多的企业和团队能够进入这一领域。
未来的终极趋势是否会是二者的结合呢?这取决于多种因素,随着算力的不断提升和成本的降低,纯视觉方案的性能将得到进一步提升,而激光雷达技术的成熟和成本的降低也将推动其在自动驾驶领域的应用,在这个过程中,两种方案的优势互补将成为一种可能的发展趋势。
纯视觉方案具有随着数据积累性能不断提升的潜力,而激光雷达方案在恶劣环境下的性能稳定性是其独特优势,通过将两种方案结合,可以在保持性能的同时,提高系统的鲁棒性,这种融合方案将有望带来更高的效率和更低的成本。
要实现纯视觉方案和激光雷达方案的结合,需要在技术、算法和硬件等多个层面进行深入研究,在算法层面,需要实现两种感知技术的有效融合,使得摄像头和激光雷达能够协同工作,提高系统的整体性能,需要开发高性能的芯片和算法以支持两种方案的融合,在硬件层面,还需要进行改进,如优化激光雷达的布置和参数设置,以提高其在不同环境下的性能。
纯视觉方案和激光雷达方案各有优势,未来的发展趋势可能是二者的结合,随着技术的不断进步和成本的降低,这种融合方案将在自动驾驶领域发挥更大的作用,我们需要关注的关键问题包括如何有效融合两种方案的优势、如何降低算力和成本的要求以及如何在不同环境下实现系统的稳定性和鲁棒性,通过解决这些问题,我们将有望推动自动驾驶技术的进一步发展,为人们的生活带来更多的便利和安全。

 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号